Automatisierung der Speisentablettierung für Kliniken
Für die Versorgung von Patient*innen in Krankenhäusern werden in Zentralküchen verschiedenste Speisen anhand von Bestellungen portioniert. Da diese eine erhöhte körperliche Belastung für die Mitarbeitenden bedeutet, soll durch den Einsatz von Robotern und Methoden der Künstlichen Intelligenz die Portionierung teilweise automatisiert werden. Um autonom die jeweiligen Bestandteile aus Behältern zu greifen, wurden Verfahren zur Objekterkennung und Greifplanung entwickelt und erprobt. Dies ermöglicht dem Roboter sich auch dynamisch an die Geschwindigkeit der menschlichen Kolleg*innen anzupassen.
Automatisierung entlastet Klinik Mitarbeitende
Für die Versorgung der Patient*innen in Krankenhäusern mit den einzelnen Mahlzeiten werden in den Zentralküchen der Service GmbH Schwarzwald verschiedenste Speisen anhand der Kundenwünsche vorportioniert und anschließend ausgeliefert. Für die Mitarbeitenden in diesen Zentralküchen besteht eine erhöhte körperliche Belastung durch monotone Tätigkeiten. Dadurch, aber auch begünstigt durch den demografischen Wandel, der die verfügbaren Kapazitäten immer mehr verknappt, erschwert sich die Personalbeschaffung zunehmend.
Projektablauf
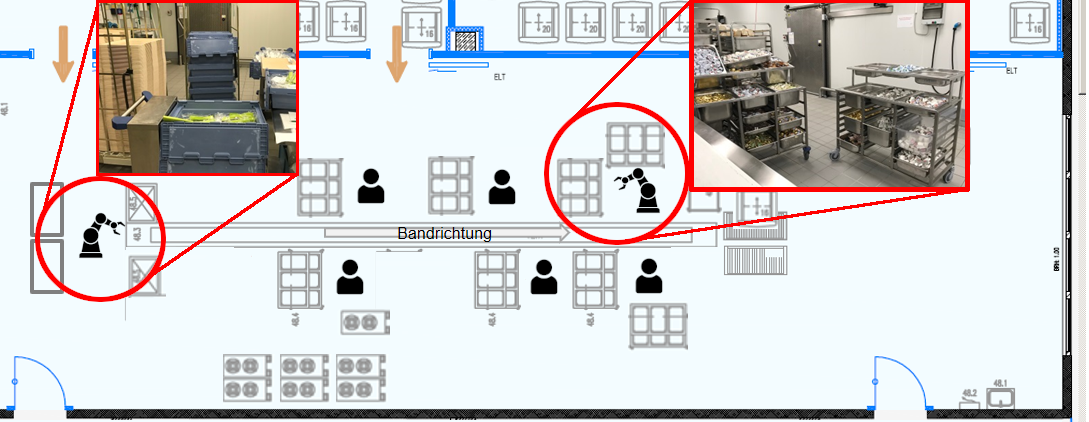
Durch den Einsatz von Robotern und Methoden der Künstlichen Intelligenz soll künftig die Portionierung der Bestellungen teilweise automatisiert werden. Die auf einem Tablett zusammenzustellenden Speisen werden dabei durch Kundenbestellungen vorgegeben, vom System automatisch lokalisiert, aus dem entsprechenden Behälter gegriffen und sorgfältig abgelegt. Um eine autonome Ausführung zu ermöglichen, werden Verfahren zur Objekterkennung und Greifplanung eingesetzt, basierend auf künstlichen neuronalen Netzen. Dies ermöglicht dem Roboter auch, sich dynamisch an die Geschwindigkeit der menschlichen Kolleg*innen anzupassen.
Typischerweise werden die Tabletts an mehreren Stationen mit Speisen befüllt. Die Lokalisierung und das autonome Greifen der Artikel kann unterschiedlich schwer sein. Deshalb wurden zuerst solche mit gutem Automatisierungspotenzial identifiziert. Ein sechsachsiger Roboterarm mit Sauggreifer konnte so die Objekte mit einer Erfolgsquote von mehr als 80 Prozent bei einer Dauer von 7 Sekunden pro Greifvorgang aufnehmen, mit Ausnahme der Bestecksets, die der Greifer nicht halten konnte.
Projektnutzen
- Validierung der Anwendbarkeit von modellfreien Greifmethoden auf das Greifen von abgepackten Lebensmitteln
- Validierung der generellen Einsetzbarkeit von Pick-and-Place Robotern zur Zusammenstellung von Speisentabletts
- Ausarbeitung eines generellen Konzeptes für die Teilautomatisierung von Tablettierungsstraßen in Zentralküchen
- Planungssicherheit und Zuverlässigkeit aufgrund flexibler, anpassbarer und robuster Robotersysteme
Durch die Durchführung dieses Projektes in Zusammenarbeit mit dem Fraunhofe-Institut sehen wir unsere Ansätze zur Digitalisierung und Automatisierung der Prozesse im Bereich der Speisenportionierung bestätigt. Es wurde transparent, dass eine dauerhafte Entlastung von Mitarbeitenden und eine Verbesserung der Betriebshygiene bei gegebener räumlicher Struktur praktisch möglich sind.
Oliver Beer, Prokurist der Krankenhaus-Service GmbH Schwarzwald
KI-Fortschrittszentrum »Lernende Systeme und Kognitive Robotik«
Künstliche Intelligenz und Robotik
Digitale Transformation und Internet der Dinge
Personalisierte Leistungen und veränderte Märkte
Demonstrator
Exploring Project
Quick Check
Industrie
![]()
Gefördert durch
