Steigerung der Absolutgenauigkeit von Industrierobotern
Machine-Learning-Verfahren zur Optimierung der Absolutgenauigkeit von Industrierobotern
Ziel des Projekts »Steigerung der Absolutgenauigkeit von Industrierobotern« ist es, das bestehende analytisch entwickelte »white box«-Modell um ein zusätzliches über Maschine Learning entwickeltes »black box«-Modell zu ergänzen, um mit dem so entstandenen »grey box«-Modell eine höhere Absolutgenauigkeit von Industrierobotern für den Einsatz in der Inlinemesstechnik zu erreichen.
Derzeitige rein modellbasierte Ansätze erreichen die geforderten Genauigkeiten von 0,2mm oder besser nicht (»white box«-Modell). Durch den Einsatz nachgeschalteter Machine-Learning-Verfahren soll ein sogennantes »black box«-Modell entwickelt werden. Dieses soll dem »white box«-Modell nachgeschaltet werden, was zu einem »grey box« Modell führt. Das neue Gesamtmodell soll die Restfehler kompensieren, welche von den bisherien Modellen nicht erfasst werden, und eine höhere Absolutgenauigkeit ermöglichen.
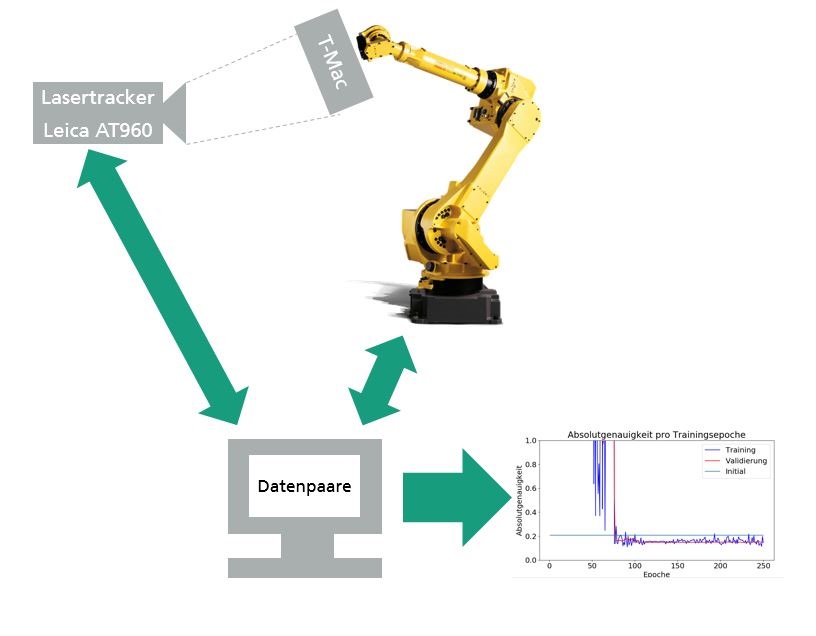
Mit einem Lasertracker werden Roboterposen in Form von Datenpaaren gemessen und aufgenommen. Anschließend kann mit diesen Daten das Modell trainiert werden. Um verwertbare Daten zu generieren, ist eine geeignete Konfiguration bezüglich des Arbeitsbereichs, der Messobjekte und der Posen des Messroboters wichtig. Während des Quick-Check Projekts stellten wir fest, dass ein solches hybrides Modell effektiv sein könnte, da das neuronale Netzwerk im Gegensatz zu einem reinen KI-Ansatz nicht die grundlegende Roboter-Kinematik lernen muss.
Projektablauf
Aufnahme von Datenpaaren
- Hardware-Setup für die Robotervermessung
- Implementierung einer Schnittstelle zwischen Roboter und Lasertracker
- Programmierung der Roboterposen
- Hand-Auge-Kalibrierung für Lasertracker und Roboter
- Abfahren des Messprogramms und Aufnahme der Datenpaare bestehend aus hochpräzisen Lasertrackerdaten und der berechneten Roboterpose unter Verwendung des »white box«-Modells
Training des Neuronalen Netzes basierend auf den Datenpaaren
- Training der verschiedenen Netzarchitekturen mit den Ergebnissen des »white box«-Modells und weiteren Roboterparametern als Input und den Lasertrackermessungen als »Ground Truth«
- Auswahl des am besten geeigneten Ansatzes
Evaluierung des neuen »grey box«-Ansatzes
- Wiederholung der Aufnahme von Datenpaaren oder Vermessung nach ISO 9283
Projektbeteiligte
- Carl Zeiss Automated Inspection GmbH
Gefördert durch
