AI Brain: Einsatz intelligenter Lernverfahren für professionelle autonome Reinigungsroboter
Adaptierbares bildverarbeitendes Verfahren zur Schmutz- und Objekterkennung
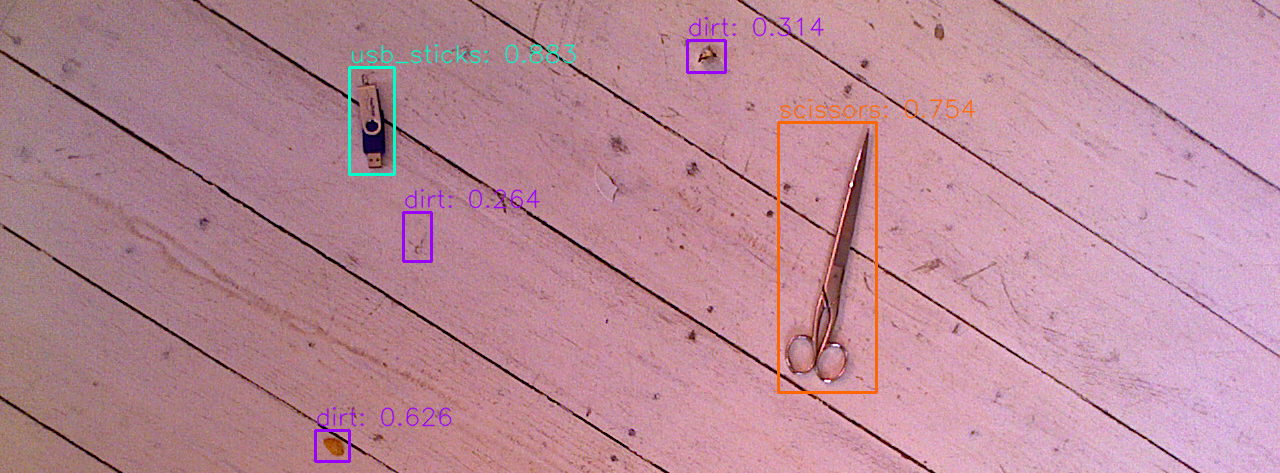
Projektinhalt war die Entwicklung intelligenter Technologien für die automatische Erkennung von Schmutz durch autonome Reinigungsroboter. Zudem sollten die Roboter dazu befähigt werden, zwischen Schmutz und Nutzgegenständen zu unterscheiden und Bodenbeläge zu klassifizieren. Dies bildet die Basis, um eine ergebnisorientierte Reinigung durchzuführen. Die dabei verfolgten Ziele sind folgende:
- Effizienzsteigerung
- Einsparung von Ressourcen (Reinigungsmittel und Energie)
- schonendere Behandlung von Bodenbelägen
- Vermeidung des Entfernens herumliegender Nutzgegenstände durch den Roboter
Aktuell verfügbare Bodenreinigungsroboter für den professionellen Einsatz sind meist für den Einsatz auf Freiflächen und in größeren Hallen konzipiert. Die Reinigung von Bürogebäuden mit vielen kleineren Einzelräumen ist damit nicht möglich. In vielen Umgebungen ist insbesondere auch eine ergebnisorientierte Reinigung erwünscht. Mit anderen Worten, ein Roboter soll nicht bei jedem Einsatz den kompletten Boden flächendeckend bearbeiten, sondern gezielt nach Schmutz suchen und diesen entfernen. Hierzu müssen Reinigungsroboter in der Lage sein, selber den Schmutz zu erkennen und diesen von anderen Gegenständen wie z.B. herabgefallenen Geldbeuteln oder Büroutensilien zu unterscheiden.
Darüber hinaus ist eine automatische Erkennung des Bodenbelagstyps wünschenswert, um sicherzustellen, dass der Roboter ein für Hartbodenbeläge vorgesehenes Nassreinigungsverfahren nicht auch auf Teppichböden anwendet. Ziel des Projekts war es daher, lernfähige und damit an die jeweilige Umgebung adaptierbare bildverarbeitende Verfahren zur Schmutz- und Objekterkennung sowie zur Klassifikation zu entwickeln. Integriert in autonome Reinigungsroboter ermöglichen diese dem Reinigungsdienstleister eine effiziente und ergebnisorientierte Reinigung.
Projektablauf
Die Bosch Engineering GmbH unterstützt ihre Kunden u. a. mit Software- und Komponentenlösungen zur automatisierten professionellen Bodenreinigung. Da sich das Fraunhofer IPA bereits längerfristig mit intelligenten Objekterkennungsverfahren beschäftigt, bot sich hier eine Zusammenarbeit an. Im Rahmen des Projekts wurden aus diesem Grund existierende Verfahren des Machine Learnings in Bezug auf die konkrete Anwendung weiterentwickelt. Parallel dazu konzipierten die Projektpartner zudem neue Verfahren und setzten diese um. Diese Verfahren basieren auf Convolutional Neural Networks (CNNs).
Das Training von neuronalen Netzwerken erfordert große Datensätze mit Beispielbildern. Um den Aufwand für die Erstellung dieser Datensätze drastisch zu reduzieren, wurde ein Softwarewerkzeug entwickelt. Dieses erzeugt aus den bestehenden Bildern von Objekten und Bodenbelägen durch die Kombination untereinander und durch das Hinzufügen von synthetisch erzeugten Schatten und Spiegelungen eine sehr große Zahl weiterer Bilder. Auf diese Weise erstellte Bilder können dann ebenfalls für das Training genutzt werden.
Im Anschluss wurde ein Algorithmus für die flächendeckende Bahnplanung dahingehend erweitert, dass er in Verbindung mit den oben beschriebenen Erkennungsverfahren auch für die gezielte Suche nach Schmutz einsetzbar ist. In der letzten Phase des Projekts wurde ein Demonstrator bestehend auf einem kleinen mobilen Roboter und den für die Schmutzerkennung erforderlichen Sensoren und Softwarekomponenten entwickelt und aufgebaut.
Projektbeteiligte
- Bosch Engineering GmbH
Gefördert durch
