Hybrides Greifplanungsframework für modellbasiertes und -freies Greifen

Die Industrie benötigt ein Greifplanungssystem, das nicht nur sehr robust in der Anwendung ist, sondern auch flexibel und von allen Endanwendern leicht zu bedienen ist. Um diese Anforderungen zu erfüllen, wurde im Projekt Greifplanung Software für ein hybrides Greifplanungsframework entwickelt. Mit diesem Framework ist es möglich, Greifaktionen sowohl modellbasiert als auch modellfrei (ohne Kenntnisse der CAD Daten) für vorgegebene Bauteile zu parametrieren. Integrierte Technologien des Maschinellen Lernens dienen dazu, Endanwendern eine einfache Nutzung des Frameworks zu ermöglichen. Dies berücksichtigt ebenso die bislang zeitintensiven manuellen Aufwände, wie bspw. einen Griff-in-die-Kiste.
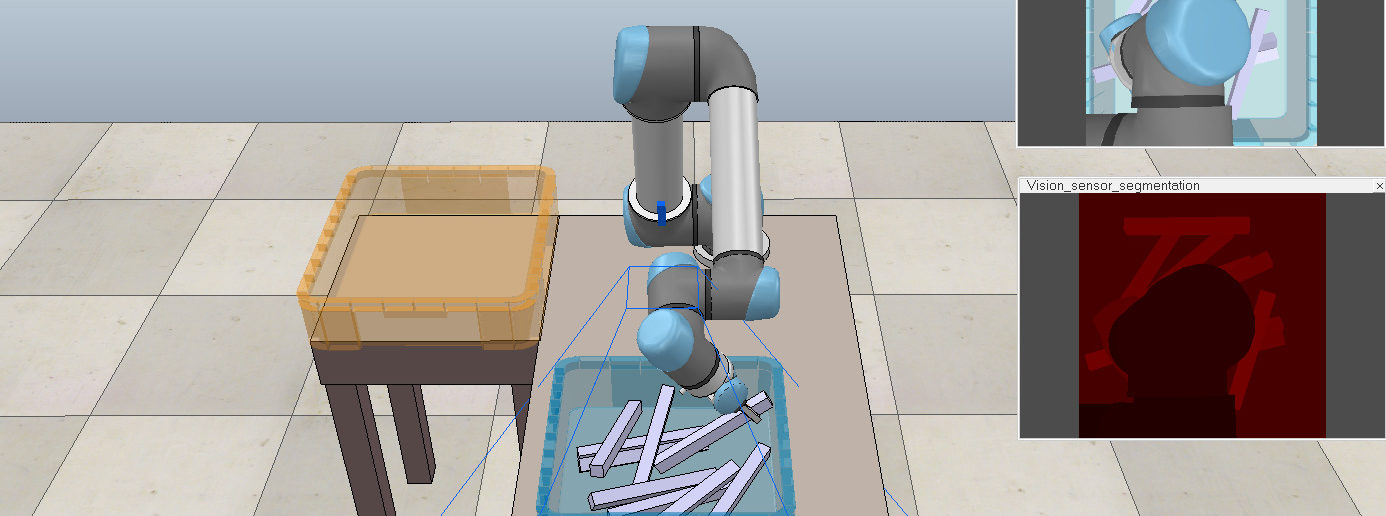
Zunehmend autonome Greifplanung
In der Produktion von individualisierten Produkten müssen zunehmend Bauteile mit unterschiedlicher Geometrie (z.B. Bauteilfamilien) vereinzelt werden. Obwohl es hier Potenzial für den Robotereinsatz gibt, scheitert der Griff-in-die-Kiste wirtschaftlich, da der Einrichtaufwand pro Bauteil noch zu hoch ist. Das Ziel des Projekts Greifplanung war es daher, das modellbasierte Greifsystem autonomer zu machen. Möglich wird dies durch Technologien, die die Einrichtung des Systems automatisieren und es unabhängiger von manuellen Einrichtaufwänden machen. Hierzu gehören die automatische Greifposengenerierung aus dem CAD-Modell des Werkstücks und die automatische Abstimmung der Parameter, um die Objektlage zu erkennen. Außerdem wurde ein modellfreies 6D-Greifsystem implementiert, das dem Anwender mehr Flexibilität bietet. Dieses Plug-and-Play-System kann jede Art von Objekt entweder mit Vakuum- oder Parallelklemmengreifern ohne manuellen Aufwand greifen. Diese modellfreie System erfordert keine Kenntnisse über das zu greifende Bauteile in Form von CAD-Daten.
Projektablauf
Das Projekt wurde in enger Abstimmung mit den Industriepartnern durchgeführt. Liebherr interessierte sich vor allem für die neuen Entwicklungen rund um modellbasierte Greifsysteme. Es gab ein Diskussionstreffen mit Liebherr, um über die Integration von KI-Modulen zu diskutieren und damit die modellbasierte Bin-Picking-Software LHRobotics.Vision von Liebherr autonomer zu machen. Möglich wurde dies durch den Ausbau eines Frameworks, das die nötigen Parameter für die Objektposenerkennung weiter reduziert. Zudem sollten die Parameter vollständig automatisiert einstellbar sein und die komplette Einrichtung für ein neues Werkstück nicht mehr als fünf Minuten beanspruchen.
Das Interesse von Daimler Trucks und drag&bot galt einem modellfreien Greifsystem, das bestimmte Leistungscharakteristika modellbasierter Greifplanungssysteme erreichen sollte. Auch hierzu wurde ein Diskussionstreffen durchgeführt, um den Anwendungsfall zu diskutieren und zu spezifizieren. Daimler war an der Implementierung eines modellfreien 6D-Greifsystems mit Vakuum- und Parallelklemmengreifern für einen Kitting-Anwendungsfall interessiert (Montagevorkommissionierung). Drag & Bot beteiligte sich an der Integration des Moduls für modellfreies Greifen in das hauseigene Roboterprogrammiersystem.
Projektnutzen
- Reduzierung des manuellen Aufwands für das Einrichten des Griff-in-die-Kiste-Systems durch die automatische Konfiguration um 50%
- Kein Fachwissen für die Generierung von Greifpunkten erforderlich
- Robustes Greifsystem zur Parametrierung von Greifaktionen
- Flexibilität bei der Verwendung eines modellfreien oder modellbasierten Greifsystems
Beteiligte Industriepartner
- Liebherr-Verzahntechnik GmbH
- Daimler Truck AG
- drag&bot GmbH
Leistungsangebot des Fraunhofer IPA
- Simulative und experimentelle Machbarkeitsuntersuchungen für Ihren Anwendungsfall
- Applikationsentwicklung für Ihren Anwendungsfall
- Lizenzierung der Greifplanungsalgorithmen (modellbasiert oder modellfrei)


Gefördert durch

